

Magnetic Compass Errors and Celestial Navigation:
Even in the age of advanced electronics, the magnetic compass and sextant continue to play a crucial role in offshore navigation. Together with paper charts and dead reckoning, they form a reliable backup system should modern navigation tools fail.
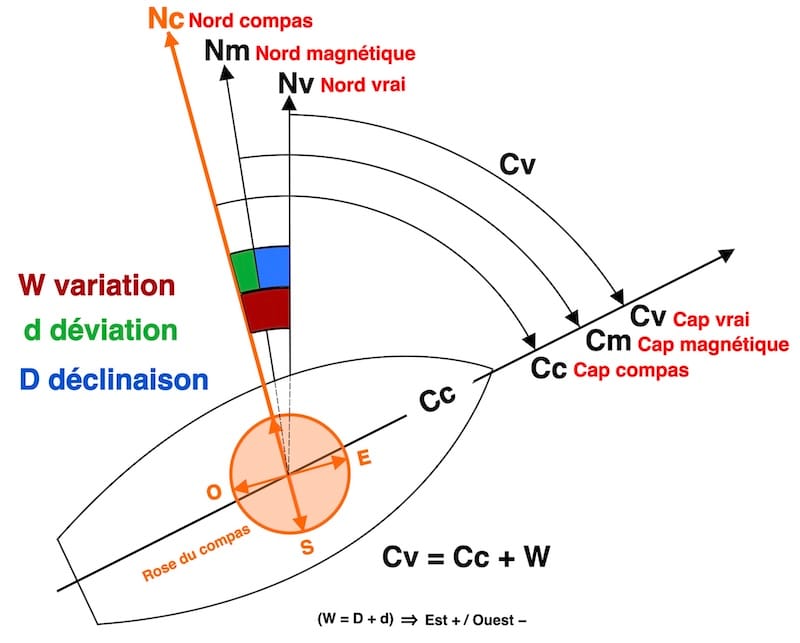
The compass error is the sum of two distinct errors: magnetic deviation (dev) and magnetic variation (var.)

Compass deviation (dev.)
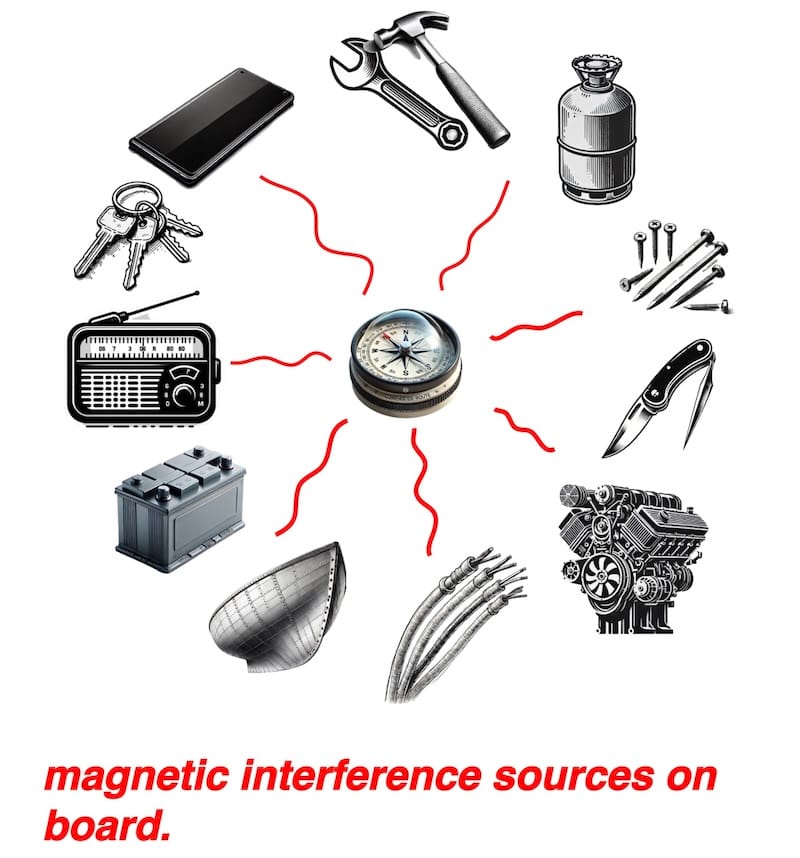
These onboard magnetic fields disrupt the Earth’s magnetic field, causing a deviation that varies depending on the ship’s heading!
Deviation is most affected on east/west headings.

Magnetic and Electrical Influences:
Many sailors are unaware of deviation. In such cases, a value of zero is assumed. The compass must then be placed at least 50 cm away from metallic sources of interference. If interference occurs, either move the interfering object away or relocate the compass.

{kind=link}
Magnetic influence follows the “inverse square law”: when the distance between a magnetic source and a compass doubles, the effect on the compass is reduced to a quarter.
Electrical influences, caused by currents flowing through nearby wires, can also disturb the compass. To prevent magnetic fields, twist the wires of a circuit in pairs, including those under the compass and the dashboard.
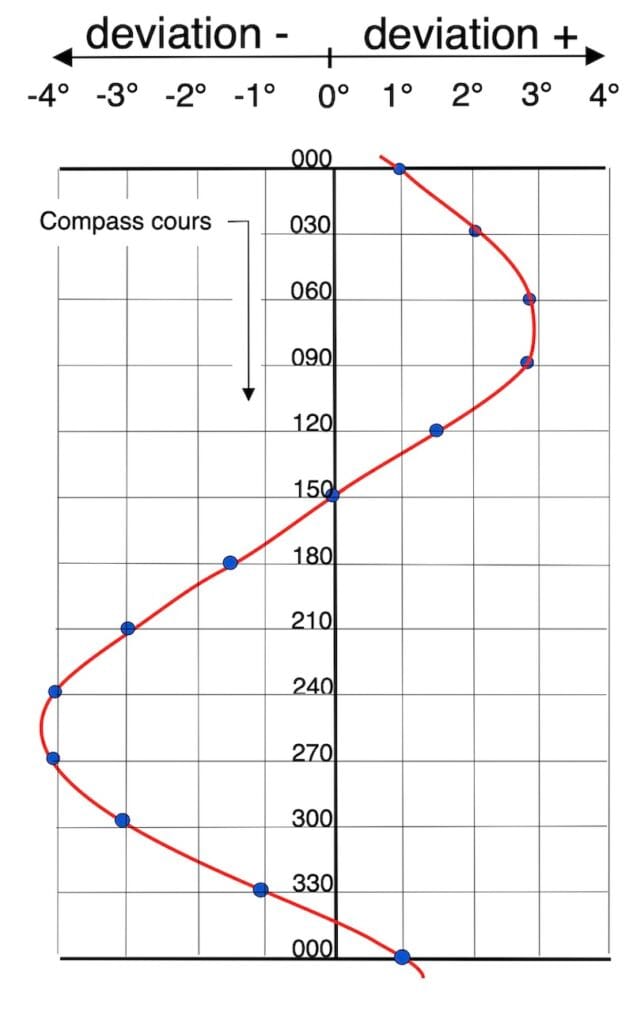
Example: compass cours is 190° → deviation is ⎼2°
Here, we see a deviation curve established for compass headings. For significant deviations, it is better to establish one curve for magnetic headings and another for compass headings.
In the Compensation and Adjustment Guide, we will learn how to establish and use the deviation curve.

{kind=link}
Magnetic variation (var)

Magnetic Variation (var)
The magnetic North Pole, the point towards which compasses align, is continuously moving due to the motion of liquid iron in the Earth’s outer core.
Since the 1990s, it has sped up, moving from 10 to over 50 km per year toward Siberia.

The geographic North Pole (Pn) is not located in the same place as the magnetic North Pole. Consequently, the directions of the Earth’s north-south meridians do not align with the magnetic field.
The angle between these two directions is called magnetic variation (var), also referred to as magnetic declination.
Because charts use Earth’s meridians, navigators adjust for changing values over time.
You can find the magnetic variation (var) near the compass roses on nautical charts. This information also includes the annual rate of change, which allows you to calculate the current variation if the chart is not up-to-date.

{kind=link}

Example: ↑
What will the magnetic variation (var) be at this location in 2025?
Over 7 years, the variation decreases:
7 ☓ 9′ = 63′ and 63′ ≈ 1°
So, var 2025 = 15° W
Because variation curves (isogones) are not shown on nautical charts, magnetic variation is usually taken from the nearest compass rose.
With the official NOAA CrowdMag app, you can easily find the current magnetic variation for your navigation location. It is available on the Google Play Store and the Apple Store.
Compass Heading (CH) and True Heading (TH):
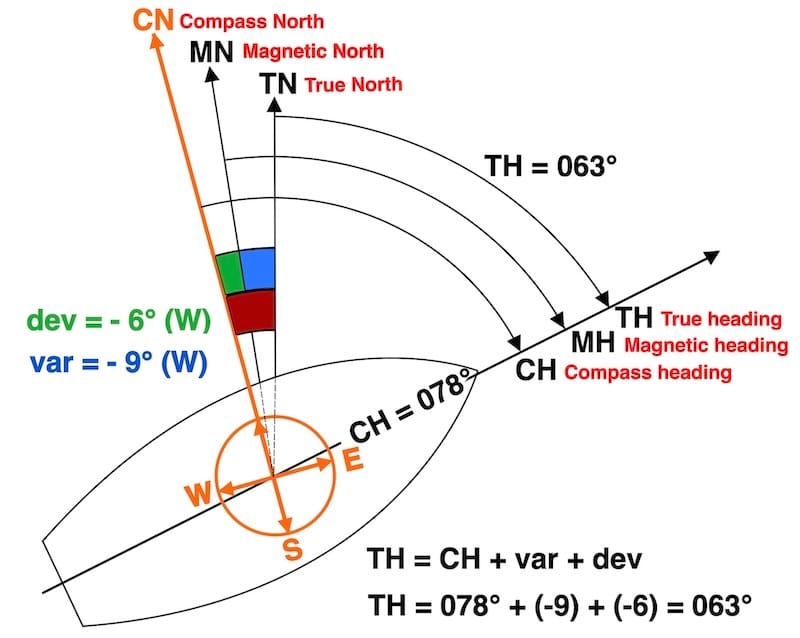
Variation (var): It is negative if Magnetic North (MN) lies to the left of True North (TN); otherwise, it is positive.
Deviation (dev): It is negative if Compass North (CN) is to the left of Magnetic North (MN); otherwise, it is positive.
West (−), East (+): Westward declinations, as well as westward deviations, are conventionally designated with a negative sign due to the clockwise ↻ direction of the compass rose.

{kind=link}


exercise: fill in the blanks

Terminology note
Terminology note
In this section, compass heading refers to the direction in which the vessel’s bow is pointing, as indicated by the magnetic compass.
Course refers to the intended direction of travel plotted on the chart.
When wind, current, and leeway are neglected, compass heading and compass course have the same numerical value.
In real navigation, they often differ.
This page is not an extended navigation course. Its sole purpose is to explain magnetic deviation and magnetic variation, in accordance with the two guides dedicated to compass adjustment and to the establishment and use of the deviation error.
If the helmsman has been steering a compass direction (CC) for a while and you need to plot the Dead Reckoning (DR) position on the chart, you can use the following formula: TH = CC + var + dev
To calculate the steering course (CC) to give to the helmsman after plotting the route on the chart, use the formula: CC = TH − var − dev.
In these two cases, it is assumed there are no wind or current effects, meaning the ship follows the heading exactly.

True Heading (TH) versus Course over Ground (COG):
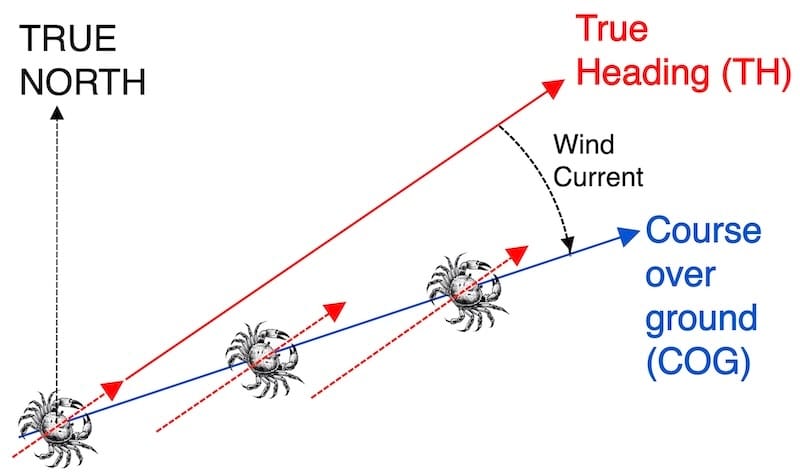
True heading (TH) refers to the direction relative to true north that the vessel’s axis is pointing, whereas the course over ground (COG) represents the vessel’s actual path, which is often influenced by wind and currents—a phenomenon known as lateral drift — often referred to as ‘crab angle’ — as illustrated in the diagram.
From compass course (CC) to course over ground (COG):
Starting from a known point, a compass heading is given to the helmsman. By accurately estimating the compass error, as well as the drift caused by wind and current, and knowing the vessel’s speed, it becomes possible to calculate the course over ground and determine the vessel’s position after a certain period of navigation.

From course over ground COG) to compass course (CC), also known as course to steer (CTS):
The course over ground (COG) has been plotted on our nautical chart. What heading should be given to the helmsman to maintain this course?
All key factors—speed, compass error, wind and current drift—are known before plotting.
Wind drift is estimated in degrees; current drift is plotted as a vector on the chart.
However, the problem is often simplified: the course is plotted on the chart, and the angular drift (Δ drift) — including wind and current — is roughly estimated in degrees.
This requires genuine understanding developed through experience.
A key aspect of this understanding is the comparison of the GPS course over ground (COG) with the true heading (TH), supported by visual observations of prominent fixed objects in the distance.